A Note on the Definition of Tensors:
Computer scientists tend to think tensors are multi-dimensional arrays of numbers, like this:
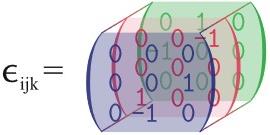
...but in the math, there is no mention of their individual components, and most mathematicians hate defining them in terms of their individual components.
basis components
Tensors are often decomposed into their basis elements, though. For example, a vector would be:
$T = T^{x^1} e_{x^1} + T^{x^2} e_{x^2} + T^{x^3} e_{x^3}$
...or, shorthand:
$T = T^{x^i} e_{x^i}$
(Though usually a single coordinate system $x^i$ is assumed, and the $x$ is dropped, and the expression looks like this: $T = T^i e_i$)
..or a matrix would be:
$A = A^{{x^1}{x^1}} e_{x^1} \otimes e_{x^1}
+ A^{{x^1}{x^2}} e_{x^1} \otimes e_{x^2}
+ A^{{x^1}{x^3}} e_{x^1} \otimes e_{x^3}$
$
+ A^{{x^2}{x^1}} e_{x^2} \otimes e_{x^1}
+ A^{{x^2}{x^2}} e_{x^2} \otimes e_{x^2}
+ A^{{x^2}{x^3}} e_{x^2} \otimes e_{x^3}$
$
+ A^{{x^3}{x^1}} e_{x^3} \otimes e_{x^1}
+ A^{{x^3}{x^2}} e_{x^3} \otimes e_{x^2}
+ A^{{x^3}{x^3}} e_{x^3} \otimes e_{x^3}
$
...or, shorthand:
$A = A^{x^i x^j} e_{x^i} \otimes e_{x^j}$
(Once again, usually just $A = A^{ij} e_i \otimes e_j$)
matrix/vector depiction
Then you could represent the components as their individual elements:
$T = \left[\begin{matrix} T^{x^1} \\ T^{x^2} \\ T^{x^3} \end{matrix}\right]$
...or...
$A = \left[\begin{matrix}
A^{{x^1}{x^1}} & A^{{x^1}{x^2}} & A^{{x^1}{x^3}} \\
A^{{x^2}{x^1}} & A^{{x^2}{x^2}} & A^{{x^2}{x^3}} \\
A^{{x^3}{x^1}} & A^{{x^3}{x^2}} & A^{{x^3}{x^3}}
\end{matrix}\right]$
...but this is only one way to represent them.
basis definition
This comes from some hidden meaning in the basis elements. They are defined as:
$e_{x^i} = \frac{\partial}{\partial x^i}$
There are a few useful byproducts of this definition.
One such byproduct can be seen when we introduce the dual basis of one-forms: $e^i = dx^i$
One-forms are the duals of vectors, and are defined as functions that act on basii, and posess the property:
$e^i (e_j) = \delta^i_j = \left\{ \begin{matrix} 1 : i = j \\ 0 : otherwise \end{matrix} \right\}$
This becomes especially apparent when we substitute these coordinate definitions:
$e^i (e_j) = dx^i (\frac{\partial}{\partial x^j}) = \frac{\partial x^i}{\partial x^j}$
change of basis
One of those meanings is, if you want to change basis from $x^i$ to $y^i$, you can use the chain rule:
$e_{x^i} = \frac{\partial}{\partial x^i}
= \frac{\partial y^j}{\partial x^i} \frac{\partial}{\partial y^j}
= \frac{\partial y^j}{\partial x^i} e_{y^j}$
...which shows how you can apply the linear transformation in $\frac{\partial y^j}{\partial x^i}$
across all your indexes to change their basis -- like changing the rulers which measure the object -- without changing the object itself:
$T = ({T^{x^i}} \frac{\partial y^j}{\partial x^i}) e_{y^j} = T^{y^j} e_{y^j}$
$A = (A^{{x^i}{x^j}} \frac{\partial y^m}{\partial x^i} \frac{\partial y^n}{\partial x^j}) e_{y^m} \otimes e_{y^n} = A^{y^m y^n} e_{y^m} \otimes e_{y^n}$
matrix multiplication
You can think of this change-of-basis as a matrix multiplication, but it in fact generalizes matrix multiplication, and also it is commutative (you can switch the order of the indexed product components no problem) while matrix multiplication is not.
Tensor change-of-basis can be depicted using matrix multiplication. Here I'm using superscript to denote which coordinate system each degree of the tensor's matrix is using.
$\textbf{T}^{(y)} = \frac{\partial\textbf{y}}{\partial\textbf{x}} \cdot \textbf{T}^x$
$\textbf{A}^{(yy)} = (\frac{\partial\textbf{y}}{\partial\textbf{x}}) \cdot \textbf{A}^{(xx)} \cdot (\frac{\partial\textbf{y}}{\partial\textbf{x}})^T $
index notation
In the wild, tensor notation is always more concise and never so verbose. Authors usually reserve one set of indexes for coordinate system $x$ (lower case letters maybe) and another for coordinate system $y$ (upper case).
So instead of $T^{x^i}$ they would write $T^i$, and $T^{x^i} e_{x^i}$ would be $T^i e_i$, and instead of $T^{y^J}$ they would write $T^J$, and $T^{y^J} e_{y^J} = T^J e_J$.
Even more lazy among authors comes the "comma derivative," where $\frac{\partial}{\partial x^i} \phi$ is reprsented as $\phi_{,i}$, and $\frac{\partial y^J}{\partial x^i} = {e_i}^J$ (see "Gravitation" by Misner, Thorne, Wheeler, 1973) , however this notation isn't used so much in recent years.
pseudotensors
This distinction of the meaning of $e_{x^i} = \frac{\partial}{\partial x^i}$ becomes important in terms of the classification of a "tensor" versus a "pseudotensor".
(In order to illustrate this example I'll have to make use of contravariant $T^i$ versus covariant $T_i$ indexes without an explanation, but bear with me.)
For example, consider the object $\frac{\partial}{\partial x^a} W_{x^b} e^{x^a} \otimes e^{x^b}$. courtesy of that partial derivative, you can no longer simply change the basis on it:
$\frac{\partial}{\partial y^a} W_{y^b} e^{y^a} \otimes e^{y^b}$
$= \frac{\partial x^c}{\partial y^a} \frac{\partial}{\partial x^c} ( \frac{\partial x^d}{\partial y^b} W_{x^d} ) \frac{\partial y^a}{\partial x^e} e^{x^e} \otimes \frac{\partial y^b}{\partial x^f} e^{x^f}$ by changing the basii and especially the derivative operator
$= \frac{\partial}{\partial x^c} ( \frac{\partial x^d}{\partial y^b} W_{x^d} ) e^{x^c} \otimes \frac{\partial y^b}{\partial x^f} e^{x^f}$ by cancelling the linear transform and inverse linear transforms of change-of-basii between x and y
$= (
\frac{\partial}{\partial x^c} \frac{\partial x^d}{\partial y^b} W_{x^d}
+ \frac{\partial x^d}{\partial y^b} \frac{\partial}{\partial x^c} W_{x^d}
) e^{x^c} \otimes \frac{\partial y^b}{\partial x^f} e^{x^f}$ by chain rule
$= \frac{\partial}{\partial x^c} (\frac{\partial x^d}{\partial y^b}) W_{x^d} e^{x^c} \otimes \frac{\partial y^b}{\partial x^f} e^{x^f}
+ \frac{\partial x^d}{\partial y^b} \frac{\partial}{\partial x^c} W_{x^d} e^{x^c} \otimes \frac{\partial y^b}{\partial x^f} e^{x^f} $ by distribution
$= \frac{\partial y^d}{\partial x^b} \frac{\partial}{\partial x^a} (\frac{\partial x^c}{\partial y^d}) W_{x^c} e^{x^a} \otimes e^{x^b}
+ \frac{\partial}{\partial x^a} W_{x^b} e^{x^a} \otimes e^{x^b} $ by more cancelling of linear transofrms of change-of-basii and relabeling of sum indexes
$\ne \frac{\partial}{\partial x^a} W_{x^b} e^{x^a} \otimes e^{x^b}$
This might look obvious with this verbose notation, but these tensors would typically be depicted as $W_{i,j} e^i \otimes e^j \ne W_{I,J} e^I \otimes e^J$, which is a mistake that can easily be made, since without the derivative $U_{ij} e^i \otimes e^j = U_{IJ} e^I \otimes e^J$ is perfectly correct.